 Trevor Exley (’20, ’21 M.S.,) will soon hold one of UNT’s first doctorates in biomedical
engineering, but he’ll leave UNT with much more than a degree.
Trevor Exley (’20, ’21 M.S.,) will soon hold one of UNT’s first doctorates in biomedical
engineering, but he’ll leave UNT with much more than a degree.
While working in Amir Jafari’s Advanced Robotic Manipulators Lab in the College of Engineering, Exley has gained instrumental experiences in performing his own research and helping other students get started on projects. He’s also been named on two patent-pending inventions that could change physical human-robot interactions in the future.
“The ARM Lab has been everything for my research,” Exley says. “As a Ph.D. student, I’ve been very focused on what kind of physical output I can have for my work and patents are definitely part of that.”
Exley isn’t the only student with research contributions to inventions under consideration for patents with the U.S. Patent and Trademark Office. Nearly a dozen undergraduate students working in the ARM Lab have been named on pending patents as well.
The patent application process is one aspect of research commercialization and an initiative Vijay Vaidyanathan, founding chair of UNT’s Department of Biomedical Engineering, hoped students could get exposure to, especially students like Exley who are pursuing a doctorate in biomedical engineering.
The doctoral degree, which debuted in Fall 2021, offers two different tracks — one for traditional academic research and another with particular focus on health care startup management in collaboration with the G. Brint Ryan College of Business. So far, there have been six graduates from the program.
“We want to cultivate an entrepreneurial mindset in our students and show them the multitude of career pathways they could take in biomedical engineering,” Vaidyanathan says. “I am thrilled to see so many patent-pending inventions coming out of Dr. Jafari’s lab. Offering students these invaluable research experiences and ways to build their scientific resumes will help set them up for future success in their careers.”
 In the ARM Lab, researchers are designing advanced robotics components that could
shape the future of human-machine interaction. At the helm is Jafari, an associate
professor of biomedical engineering who is a robotics expert with seven patents of
his own.
In the ARM Lab, researchers are designing advanced robotics components that could
shape the future of human-machine interaction. At the helm is Jafari, an associate
professor of biomedical engineering who is a robotics expert with seven patents of
his own.
Jafari’s work has a distinct focus on developing ways to improve physical rehabilitation and increase mobility, such as for people who’ve suffered strokes or have been diagnosed with Parkinson’s disease.
“Soft robotics is an emerging field that is changing really fast,” Jafari says. “We are developing technologies in this lab that have the potential to help people in the future — from robotics used in surgeries to those used in rehabilitation to help increase mobility.”
Exley’s research is updating the design of actuators, a building block of robots that helps give them motion. His goal is to make robotic movements — specifically those made to mimic muscles and joints — more human-like and more adaptable in unpredictable situations.
As a member of the Graduate Research Training Initiative for Student Enhancement, or G-RISE, he’s been given financial support and resources to further his education and research endeavors. The U.S. National Institutes of Health-funded program available at UNT recruits and prepares a diverse pool of doctoral scientists for careers in biomedical research fields.
“I’m very thankful to be part of the G-RISE program,” Exley says. “As a first-generation student, it’s helped me navigate how to get a Ph.D. and has been fundamental in enabling me to focus on my research.”
“I’ll be carrying on all I’ve learned at UNT and working with Dr. Jafari as I continue to grow as a researcher and hopefully start my own lab someday.”
Other inventions from the ARM Lab have been spurred from projects for North Texas Design, a capstone event for senior undergraduate engineering students that tasks them with developing innovative solutions for real-world problems.
Learn more below about Exley’s research and other student inventions from the ARM Lab.
Thermal-Based Variable Impedance Actuator
Inventors:
- Associate professor and principal investigator Amir Jafari
- Doctoral student Trevor W. Exley
About the Invention: In the realm of physical human-robot interaction, ensuring safety and adaptability in unpredictable environments is paramount. This has spurred the development of variable impedance actuators (VIA), devices that can modify their resistance to motion — encompassing stiffness, damping and inertia — to optimize interaction with humans and unknown surroundings. This technology introduces a thermal-based VIA that distinguishes itself by manipulating the temperature of a thermoplastic polymer, specifically polycaprolactone, to adjust its impedance. Diverging from conventional methods that rely on mechanical adjustments, this approach offers a simpler, lighter and potentially more scalable solution. By integrating thermoelectric Peltier elements, this actuator can vary its stiffness and damping by heating or cooling the polymer.
Real-World Impact: “This actuator holds significant promise for applications where size, weight and adaptability are critical, paving the way for a new generation of robotic actuators adept at safe and efficient human-robot collaboration,” Exley says.
Thermoactivate Modular Soft Actuator based on Phase Transition
Inventors:
- Associate professor and PI Amir Jafari
- Doctoral student Trevor W. Exley
About the Invention: This modular soft actuator design is primarily aimed at enhancing wearable assistive robots’ efficiency and portability. The novel actuator harnesses liquid-gas phase transition to achieve significant advancements in actuation technology. The use of Peltier elements in the design allows for precise temperature control, enabling rapid phase transitions within the actuator’s materials. This approach overcomes the common challenge of slow cooling times in thermo-responsive actuators, giving way for more efficient and responsive operation. Its modular nature allows for easy integration into various applications, from prosthetics to assistive garments, offering assistive devices that are not only effective but also comfortable and discreet for daily use.
Real-World Impact: “By addressing the limitations of existing thermal actuation methods and introducing a scalable, efficient solution, this invention holds the potential to significantly improve the quality of life for millions with mobility challenges,” Exley says. “This actuator represents a leap forward from traditional, cumbersome exoskeletons or passive braces, offering a lightweight, adaptable alternative.”
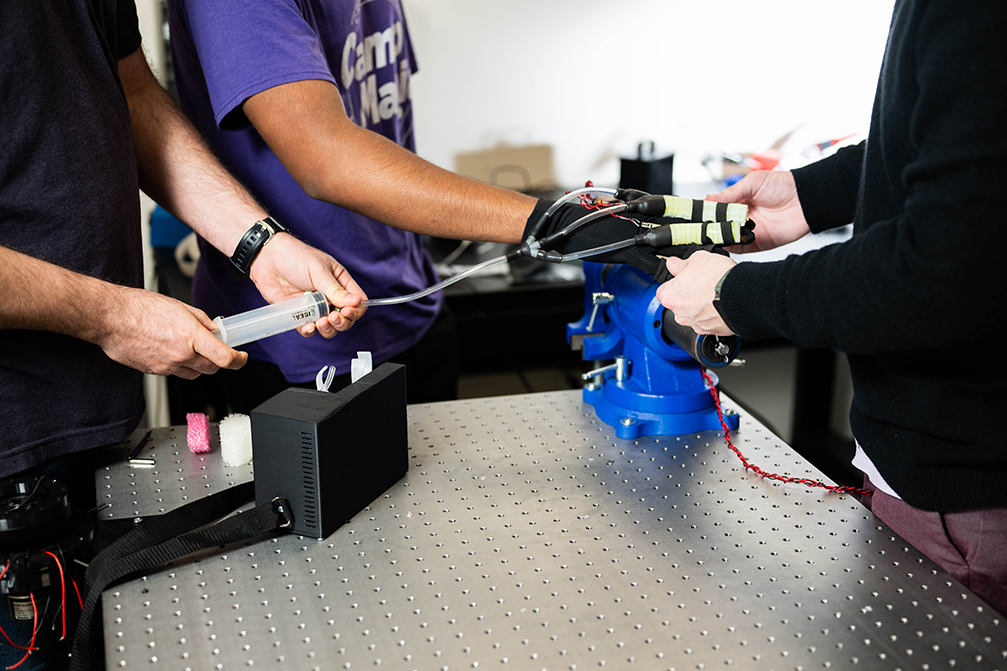
Active Soft Robotic Glove
Inventors:
- Associate professor and PI Amir Jafari
- Doctoral student Trevor W. Exley
- Undergraduate students Emily Carney, Kobe Cruz, Emilly Hays, Jack Slayton and Gary Tejeda-Godinez
About the Invention: The hydraulic-actuated soft robotic glove is specifically designed to bolster hand movement and dexterity across a spectrum of motions, including grasping, pinching and pointing. Constructed from a composite material blend akin to that used in athletic gloves, this device marries functionality with comfort. The integration of a vinyl tubing system, connected to a water supply and governed by a peristaltic pump, culminates in a glove that is both lightweight and user-friendly. The soft actuators, pivotal to the glove's functionality, are fabricated from eco-flex 30 silicone and reinforced with zinc oxide to enhance their structural integrity. The glove’s intuitive control system functions using flex sensors strategically placed on the thumb, index and middle fingers, thereby mirroring the natural movements of the human hand.
Real-World Impact: “This invention is especially advantageous for individuals with diminished muscle strength, providing a supportive mechanism that enhances their ability to perform daily tasks with greater ease and efficiency,” Exley says.
Peltier-Integrated Therapeutic Wrap
Inventors:
- Associate professor and PI Amir Jafari
- Doctoral student Trevor Exley
- Undergraduate students Kaleigh Ruiz, Samantha Ryan, Sarah Stutsman, Tanya Tirumala, JaTara Williams
About the Invention: The Peltier-integrated therapeutic wrap was designed to address muscle and joint discomfort resulting from strains, injuries or chronic conditions. Built upon the principles of thermal management and mechanical design, the wrap conforms to the body’s joints, providing targeted relief. It’s constructed to be size-adjustable, ensuring a perfect fit for various body types, and features a straightforward control system that allows users to easily switch between heating and cooling modes. This device stands out from existing thermal therapy solutions by combining both heating and cooling functionalities into one compact, flexible form. This dual capability is rarely seen in conventional medical devices, which typically focus on either heating or cooling.
Real-World Impact: “The device’s versatility makes it an ideal therapy solution for a wide range of conditions, including sore muscles, joint injuries and chronic ailments like arthritis,” Exley says. “As the device continues to be refined and tested, it holds the promise of becoming a staple in therapeutic care and personal wellness regimens.”